von
von Zielstellung
Nachdem ich ja nun in Sachen PA einiges an Umbauten und Modifikationen in der letzten Zeit umgesetzt habe oder vielmehr umsetzen musste, reifte irgendwann die Entscheidung für ein Eigenbau-PA-Projekt. Dieses habe ich nun gestartet.
Folgende Vorgaben sollen erfüllt werden:
- die Funktion als HF-Verstärker steht im Fokus und leitet das gesamte Projekt als „roter Faden“
- technische Spielchen, die keinen echten Nutzen bringen, bleiben komplett außen vor
- 400-500W HF-Ausgangsleistung bei max. 5W Eingangsleistung, mind. jedoch 400W, also 100W x 4
- geeignet für unbeaufsichtigten Remote-Betrieb in Kombination mit meinem Hermes-Lite 2
- Zugriff auf angebotene Bausätze, keine eigene Platinenerstellung oder ähnliches, Einsatz bereits bewährter Konzepte – denn das Fahrrad wurde bereits erfunden 🙂
- keine Röhrentechnik !
- Steuerung der PA inkl. der dafür notwendigen Softwareentwicklungen durch mich, keine Fremd-/Drittlösungen !
- Kostendeckelung der gesamten PA möglichst < 1000€
Planungsfeststellung
Nach längeren Recherchen und Verfügbarkeitsanalysen der notwendigen Komponenten habe ich mich für den Aufbau einer PA auf Basis von 2x MRF300 LD-MOSFETs (Hersteller NXP) entschieden. Die dafür notwendigen Bausätze (im Grunde bereits fast fertig aufgebaut) fand ich bei DX WORLD Electronics aus Griechenland. Da werden auch bereits fertige PA angeboten, aber ich will ja selber bauen und meine eigenen Vorstellungen umsetzen.
Bei den MRF300 handelt es sich um LD-MOSFET RF Leistungstransistoren von NXP, die mit Spannungen zwischen 30..50V betrieben werden müssen. Fertige Platinen zur Sende-/Empfangsumschaltung fanden sich dort ebenfalls inklusive erforderlicher Lowpass-Filter zur Oberwellenunterdrückung, die bereits für Leistungen zwischen 1,5kW bis 2kW konfiguriert sind. Den passenden Kühlkörper kann man da auch gleich mitbestellen.
Die Steuerung der PA wie das korrekte Schalten eines Bandes vom Lowpass-Filter übernimmt ein μC auf Basis eines ESP32, der zugleich wegen seiner WiFi-Fähigkeit die Remoteüberwachung der PA übernehmen wird (mittels Webserver auf Websocket-Basis). Die erforderliche Softwareentwicklung ist bereits abgeschlossen und wurde bereits teilweise bei meinen Modifikationen der 100W-MOSFET-PAs getestet und bereits zum Praxiseinsatz gebracht.
Soweit zu meinem grundsätzlichen PA-Konzept. Der Steuer-TRX wird mein Hermes-Lite 2 sein, seine max. 5W Ansteuerleistung reichen für die 500..600W HF-Leistung der PA aus – das passt also genau.
Milestone 1: Spannungsversorgung der PA
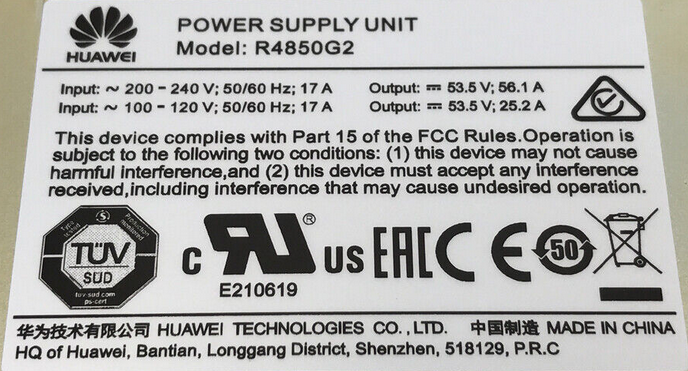
Wie schon geschrieben, wir benötigen in diesem Fall keine 12V Betriebsspannung, sondern um die 50V bei einer Stromaufnahme zwischen 25…35A, je nach geplanter Ausgangsleistung von bis zu 600W. Entschieden habe ich mich, da ausreichend verfügbar, für ein Schaltnetzteil von Huawei R4850G2 (3000W, liefert 41…58V einstellbare Ausgangsspannung bei bis zu 56A Strom, ebenfalls einstellbar). Der eingebaute Lüfter sorgt für die notwendige Kühlung, ist aber leider nicht besonders leise.

Frontansicht Huawei R4850G2
(Lüfter hinter dem Gitter)
Solche Netzteile bekommt man u.a. gebraucht bei Ebay um die 150€, früher gab es die schon mal deutlich günstiger, aber seit die Solar-Hobbyisten dieses Netzteil auch als Ladegerät entdeckt haben, sind die Preise dafür nunmal etwas höher geworden. Das Netzteil ist hochwertig (Industriequalität) aufgebaut, ist HF-fest (wichtig!) und hat als Besonderheit ein CAN-Bus-Interface, über das man Spannung und Strom selbst einstellen kann. Ab Werk liefert das Netzteil 53,5V, solange man es nicht neu- bzw. umprogrammiert.

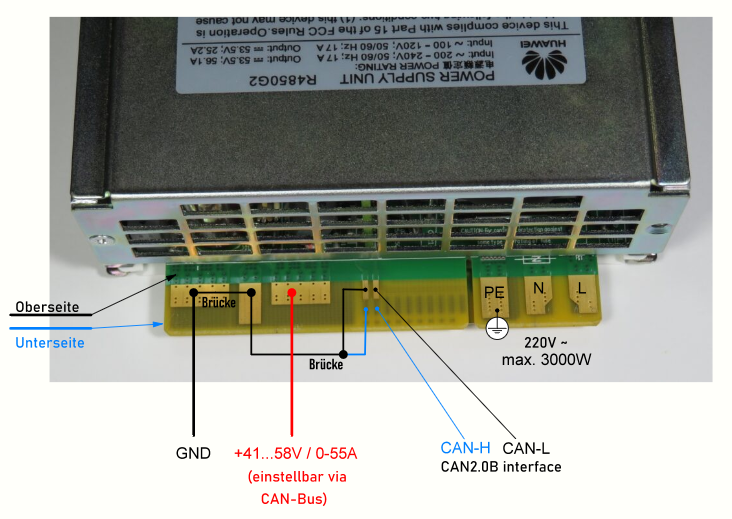
Rückseite mit Anschlußleiste Huawei R4850G2
(bereits umgebaut, noch ohne Anschlüsse für den CAN-Bus)
Man muss ein paar kleine Modifikationen am Netzteil vornehmen, da es eigentlich als Einschub für Industrieanwendungen konzipiert ist. Zum Glück, da sehr verbreitet durch die Solar-Hobbyisten, findet man alle notwendigen Infos dazu im Internet.
Modifikation des R4850G2 für den Offline-Betrieb
(bedeutet: CAN-Bus nicht aktiv bzw. angeschlossen), also Standalone-Betrieb
Für die Konfiguration des R4850G2 habe ich einen Arduino Nano mit einem CAN-Bus-Interface MCP2515 eingesetzt, so dass ich das R4850G2 entsprechend programmieren konnte. Das ging besser als gedacht, grundsätzlich könnte man das CAN-Bus-Interface am Netzteil angeschlossen lassen und damit auf einem kleinen OLED-Display die Betriebsparameter Spannung/Strom/aktuelle Leistungsaufnahme/Temperatur in Echtzeit abfragen und darstellen.
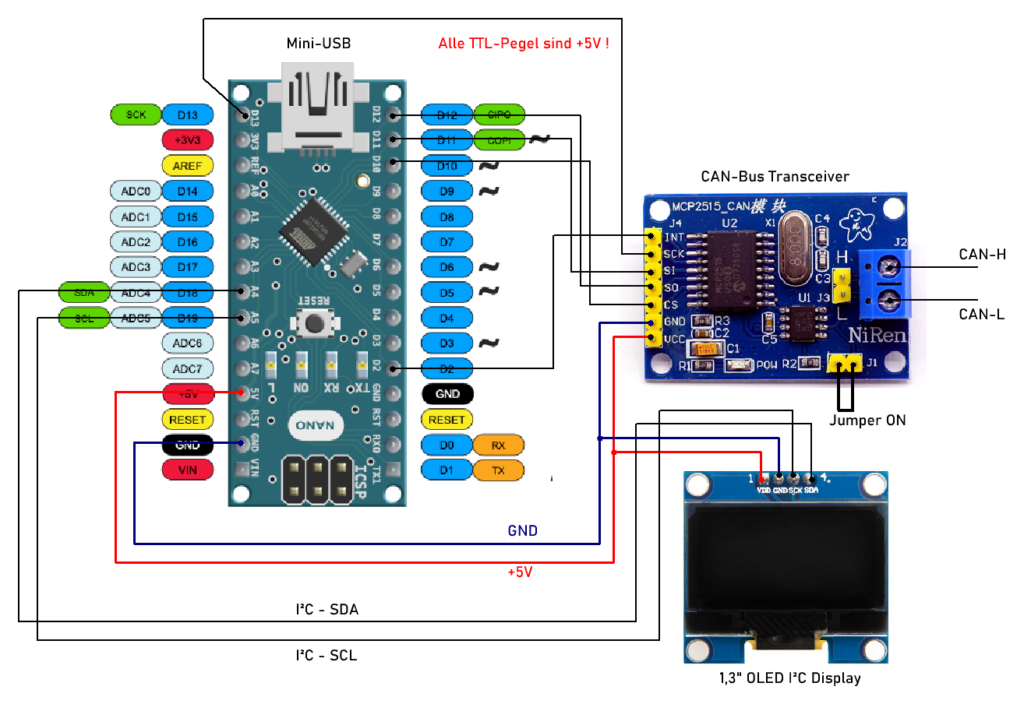
CAN-Bus Interface zum Programmieren des R4850G2 mit einem Arduino Nano
Wichtig sind die Parameter Spannung und Strom für den „Offline-Betrieb“ genannten Modus, also was das Netzteil ohne angeschlossene CAN-Bus-Steuerung nach dem Einschalten an Spannung liefern soll und ab welchem Wert die Strombegrenzung einsetzen soll. Mit aktiver CAN-Bus-Steuerung kann man diese Werte praktisch während des Betriebs ändern, sie sind aber in diesem Falle nur temporär, nach Aus- und Einschalten des R4850G2 sind erstmal wieder die programmierten Werte für den Offline-Betrieb als Startparameter aktiv.
Warum kein ESP32 anstatt des Arduino Nano ?
Das CAN-Bus-Interfaceboard MCP2515 ist für ein TTL-Pegel von 5V ausgelegt. Die ESP32 liefern aber nur 3.3V an den GPIO-Ports.
Der Arduino Nano hingegen arbeitet mit 5V-TTL-Pegel und passt damit optimal zum MCP2515.
Es gibt eine Modifikation des MCP2515-Interface-Boards (Auftrennen der Betriebsspannungen für den MCP2515 [U2] mit 3.3V und dem eigentlichen CAN-Bus-Transceiver [U1] mit 5V, damit sollte das auch am ESP32 funktionieren).
Da ich aber das Netzteil nur einmal einstellen musste, habe ich auf diese Modifikation verzichtet, der Aufwand war einfach nicht lohnenswert genug.
Anders als bisher werde ich meinen eigens für das R4850G2 entwickelten Quellcode für den Arduino Nano derzeit nicht veröffentlichen, auch keine fertig compilierten Binaries. Dafür gibt es triftige Gründe meinerseits – der Code ist und bleibt vermutlich, mehr oder weniger, nur im Alpha-Stadium und ist somit nichts, was man in dieser Form einer breiten Öffentlichkeit zugänglich machen könnte. Für meine eigenen Zwecke reicht er allerdings völlig aus und erfüllt seinen Zweck – das Einstellen der erforderlichen Spannung und der Strombegrenzung des R4850G2 für die PA mittels CAN-Bus.
Es finden sich aber genug ähnliche Lösungen u.a. bei Github, ebenfalls basierend auf dem Arduino Nano und dem MCP2515-CAN-Interfaceboard.
Milestone 2: Bestellung der PA-Komponenten und Bausätze
Folgende Komponenten habe ich für den Aufbau der PA ausgewählt und bereits bestellt:
| Komponente | Einsatzzweck |
|---|---|
| MRF300 LDMOS 600W HF/6M LINEAR AMPLIFIER 160-6M MRF300 INCLUDED V2.0 | PA-Mainboard inkl. 2x MRF300AN/BN |
| RX/TX & ANTENNA SWITCH 2000W | S/E-Umschaltung mit Relais, zwei Antennen möglich |
| REGULATOR STEP DOWN TO 12V | 50V-to-12V für BIAS und Relais, spart zusätzliche +12V Versorgung |
| HEATSINK DX-20 | Kühlkörper Aluminium 200 x 160 x 40mm |
Benötigt werden sonst noch (das Meiste ist bereits vorhanden):
- Antenneneinbaubuchsen N-Norm
- Lüfter für die aktive Kühlung der PA
- Koaxkabel (Teflon)
- Schrauben und Befestigungsmaterial
- Kühlpaste für die MRF300
- Drähte und Litzen zum Verdrahten der Baugruppen
- sonstiges Kleinmaterial
- μC WAVESHARE ESP32-S3 Zero
- Lowpass-Filter für die normgerechte Oberwellenunterdrückung
Zuzüglich entsprechener Werkzeuge, Mess- und Hilfsmittel zum Be- und Verarbeiten der Komponenten und der Gesamtkonstruktion der ganzen PA und deren korrektes Setup in Bezug auf die HF-Parameter.
Meine Lieferung (mit FedEx) ist bereits unterwegs und wird um den 22.5.2024 erwartet. Dann gehts hier weiter mit Teil 2.